Engineering Portfolio · Zhaolin Wei
Mechanical CAD-driven engineering.
Precision assemblies · Control systems · Manufacturing-ready design.
SolidWorks · MATLAB/Simulink · Python · OpenCV · Arduino · FEA
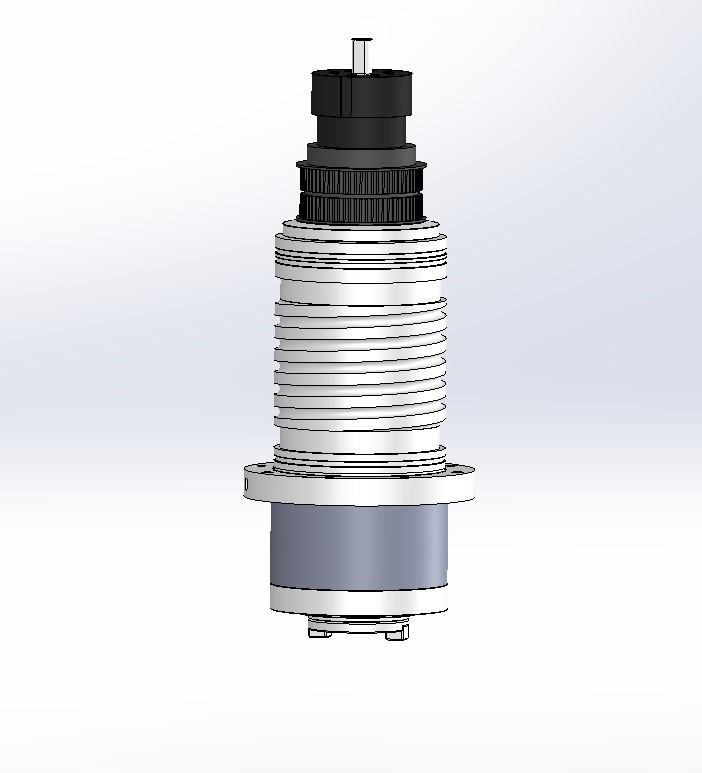
High-Speed Motor Spindle
Industrial CNC spindle design for Fuwode Machinery — full SolidWorks assembly, bearing selection, thermal management, and interference-fit validation.

S45C Motor Shaft Fatigue Failure Analysis
Root-cause investigation of industrial motor shaft fatigue crack — SEM fracture analysis, stress concentration evaluation, heat treatment audit and redesign recommendation.

Vintage Sewing Machine — Mechanism Design
50+ component parametric SolidWorks assembly — full GD&T application, tolerance stack-up analysis, and kinematic motion study across complex mechanical linkages.
BLDC Motor Drive — MTPV Control Optimization
Maximum Torque Per Voltage strategy with optimal voltage lead angle derivation. Simulink AVM simulation — Electric Power & Energy Systems Group, UBC.
Autonomous HVAC Control System
Internship project at Sands China — GUI-based autonomous HVAC automation with real-time feedback loops and energy consumption optimization across multiple zones.

Automated Warehouse Management System
2D simulation platform with configurable warehouse layout, robot fleet management, and automated task scheduling via graphical interface. UBC course design.
Electromagnetic Calculation Tool — DC PM Motors
Python automation of magnetic circuit analysis for DC permanent magnet motors — eliminates manual iteration in preliminary design and outputs performance prediction curves.

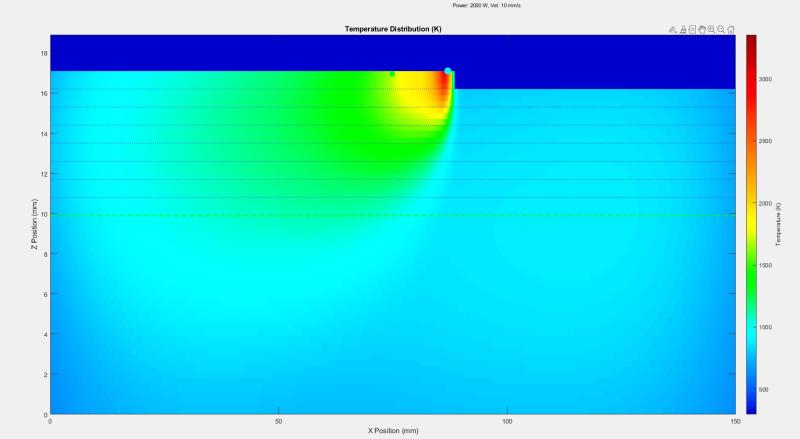
L-DED Closed-Loop Temperature Monitoring
Graduate thesis — real-time melt pool temperature stabilization for laser-based directed energy deposition. Closed-loop thermal control reducing deposition defects. CEL & AMP Labs, UBC.
Self-Powered Flexible Sensor System
Novel wearable self-powered electromechanical sensors for pulse and muscle signal detection — material synthesis through wearable device integration. Soft Sensors Lab.
A17050 Slot Milling Chatter Stability & Optimization
FRF modeling, Stability Lobe Diagram, critical depth calculation, lead-lag feed drive control, and trapezoidal trajectory planning for CNC aluminum slot milling.
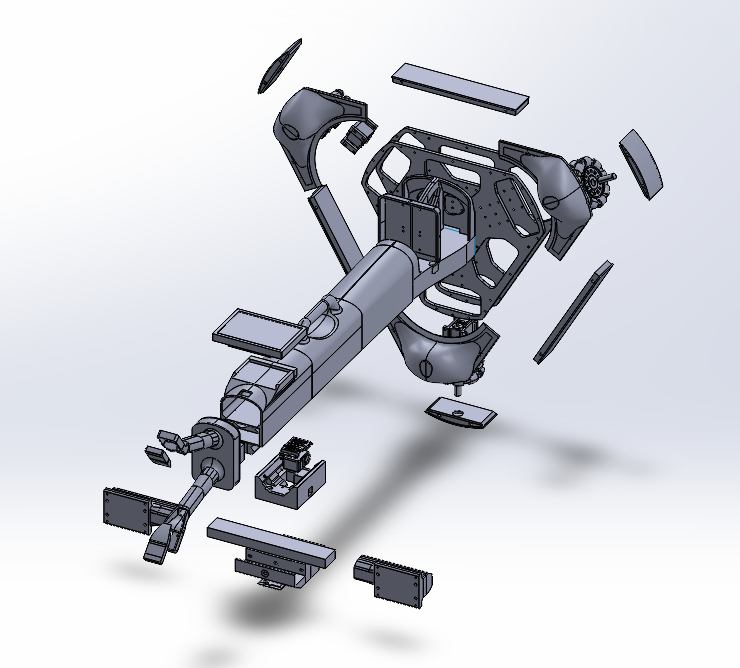
Low-Cost Dual-Arm Mobile Robot — AlohaMini In Progress
Open-source teleoperated dual-arm manipulator — hardware integration, actuator control implementation, and imitation learning data collection pipeline.
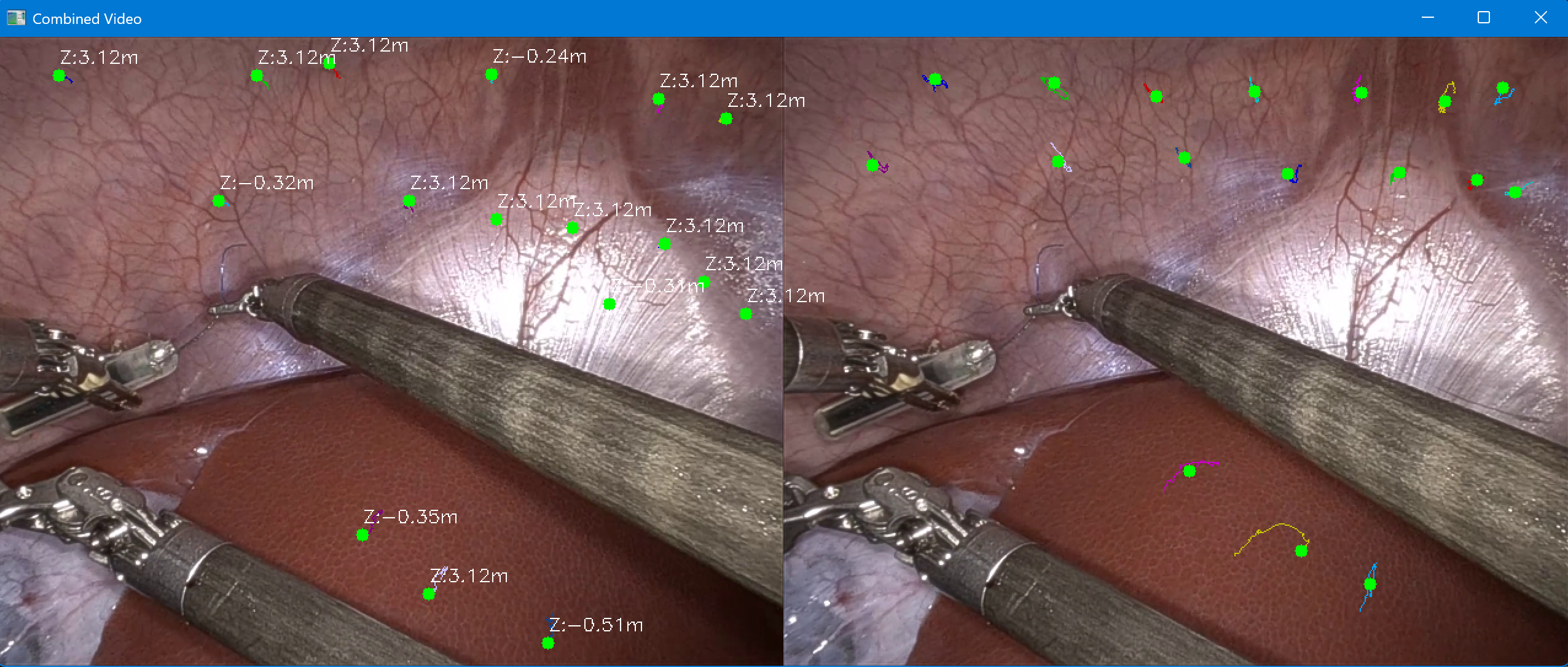
3D Surgical Instrument & Tissue Tracking
Real-time stereo vision tracking — Lucas-Kanade optical flow with Shi-Tomasi corner detection. Sub-pixel accuracy <0.8 px · 15% fewer tracking failures during rapid motion.
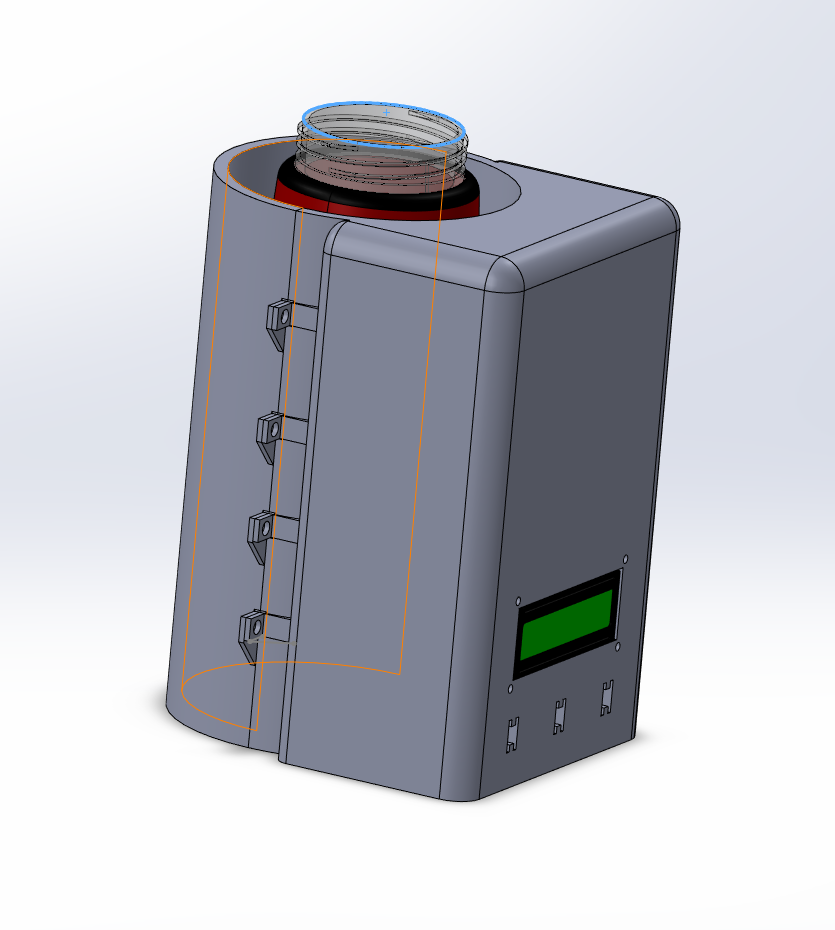
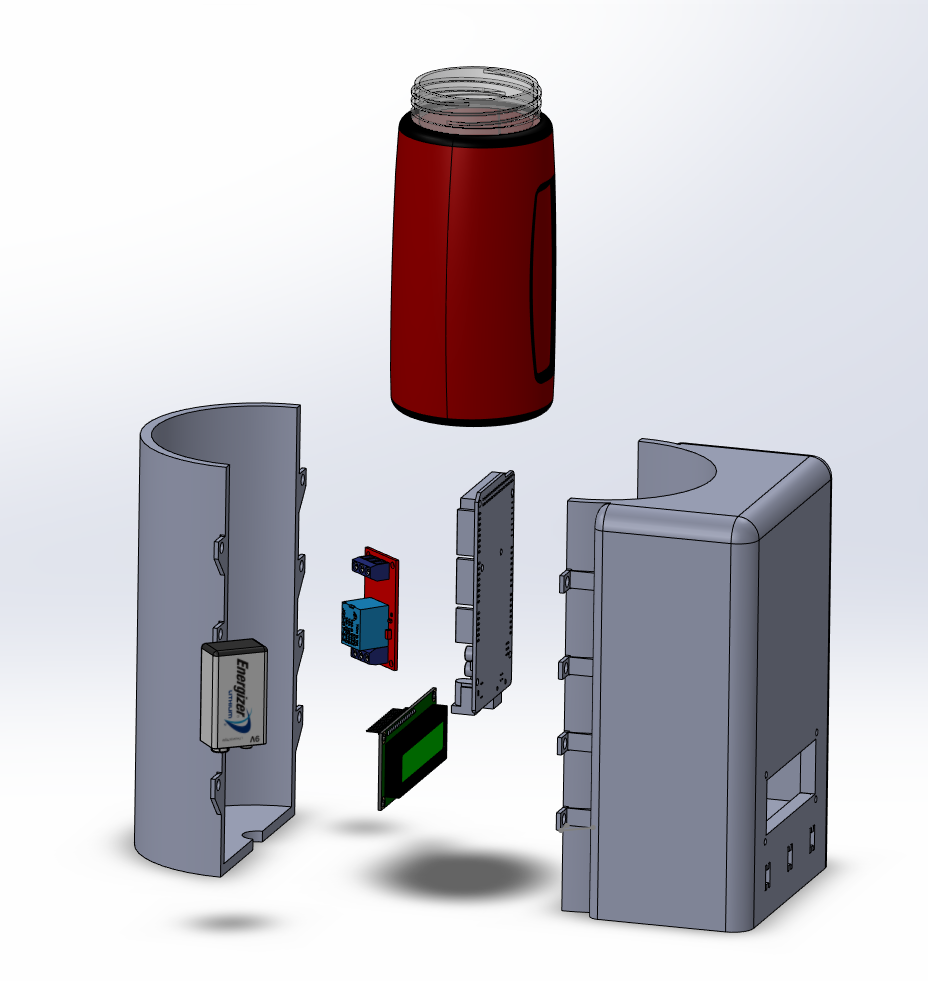
Arduino Smart Cup Heater
Closed-loop temperature control with calibrated NTC sensor, user-selectable 10–80°C setpoint via button interface, and real-time LCD feedback.
Embedded Sensor Interface — Coming Soon
Embedded firmware development project — sensor data acquisition and real-time processing on microcontroller platform.
 Click to enlarge
Click to enlarge
Mechanical Design · Fuwode Machinery Co., Ltd.
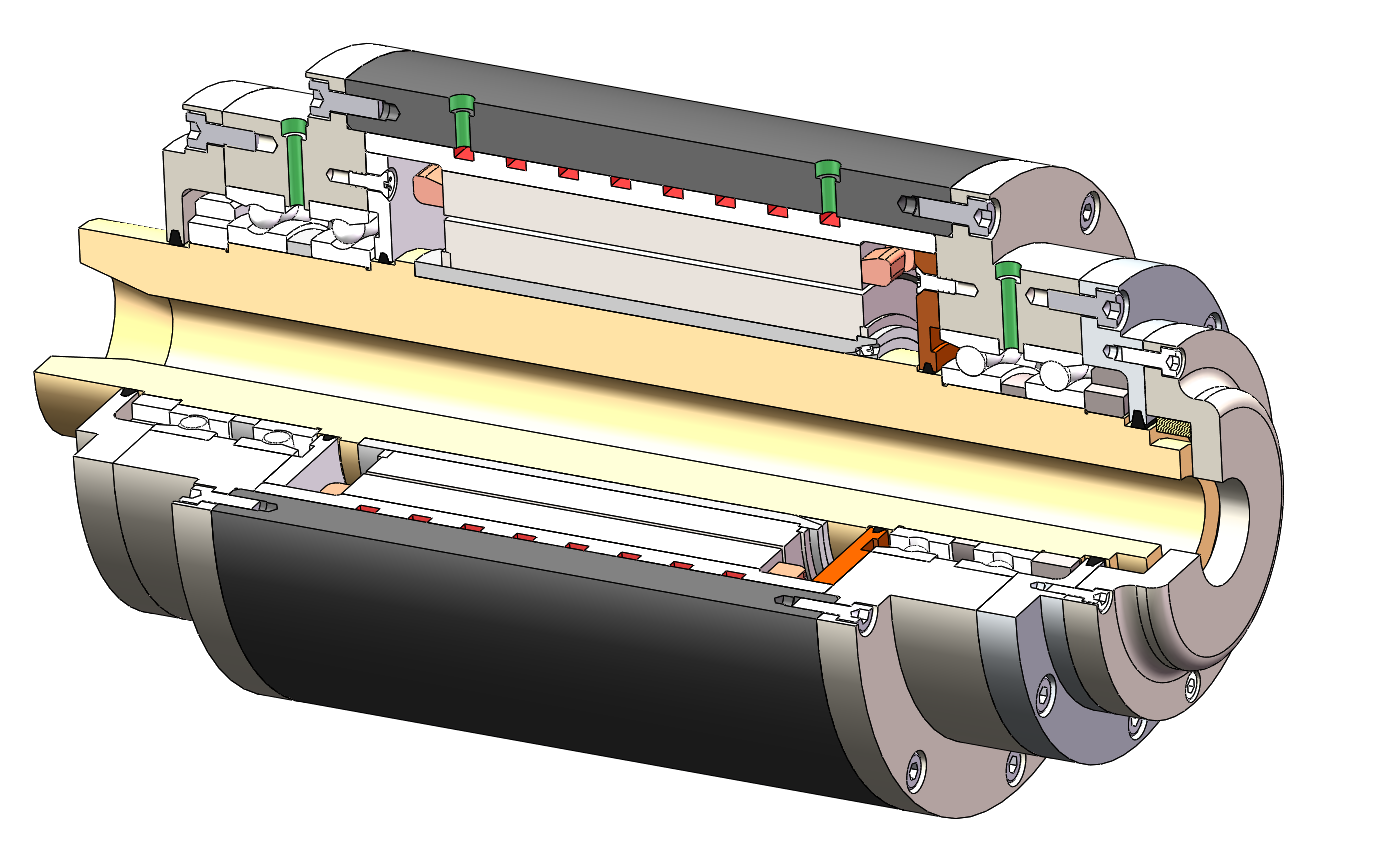
High-Speed Motor Spindle
Industrial CNC spindle series designed to client specifications — complete SolidWorks assemblies from concept through manufacturing-approved documentation, covering thermal, structural, and tolerance validation.
Client
Fuwode Machinery Co., Ltd.
Industrial CNC Applications
Scope
- Bearing selection & preload optimization
- Thermal management modeling
- Interference-fit validation
- Structural stiffness verification
Deliverables
- A12B spindle full assembly
- A4 BT40 spindle assembly
- Tolerance stack-up report
- GD&T per ASME Y14.5
- Approved for precision manufacture
Engineering Highlights
- High-speed bearing preload optimization for radial stiffness under dynamic load
- Thermal expansion compensation preventing preload loss at operating temperature
- Interference-fit validated with precision concentricity control (≤2 µm runout target)
- Stiffness-to-weight optimization reducing vibration amplitude at high RPM
Failure Analysis · Fuwode Machinery Co., Ltd.
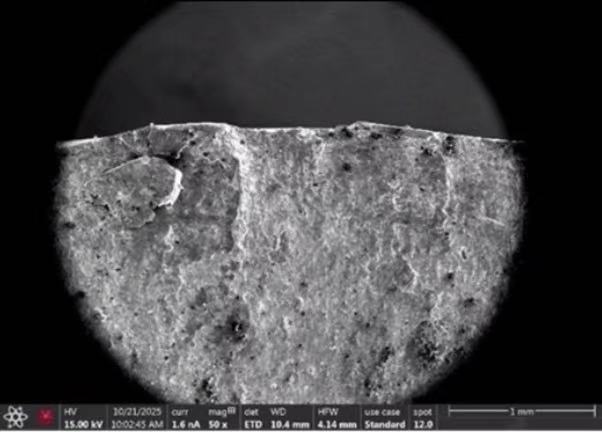
S45C Motor Shaft Fatigue Failure Analysis
Root-cause investigation of premature shaft failure in service. Identified rotational bending fatigue at a stress-concentrating shoulder, exacerbated by improper induction hardening process sequence.
Failure Mode
Rotational bending fatigue at shaft shoulder (Ø53.5 → Ø52.5 mm). Classic beach marks on fracture surface confirm progressive fatigue crack propagation.
Material Condition
S45C steel — coarse grain structure, Widmanstätten microstructure indicating overheating (~880°C) and improper induction heat treatment.
Root Cause
Stress concentration at fillet (R0.1) · Shallow hardened layer · Semi-finish machining removed the treated surface at the highest-stress section.
Process Sequence Error
Heat treatment applied before final machining — negating the hardened surface layer precisely at the critical stress concentration location.
Corrective Recommendations
- Increase fillet radius at shoulder transition: R0.1 → R ≥ 0.5 mm
- Audit induction hardening parameters — reduce peak temperature to suppress grain coarsening
- Revise sequence: Rough machine → Heat treat → Semi-finish (preserve hardened layer)
- Add hardness verification step post semi-finish to confirm case depth retention
Click to enlarge
Mechanical Design · UBC Course Project
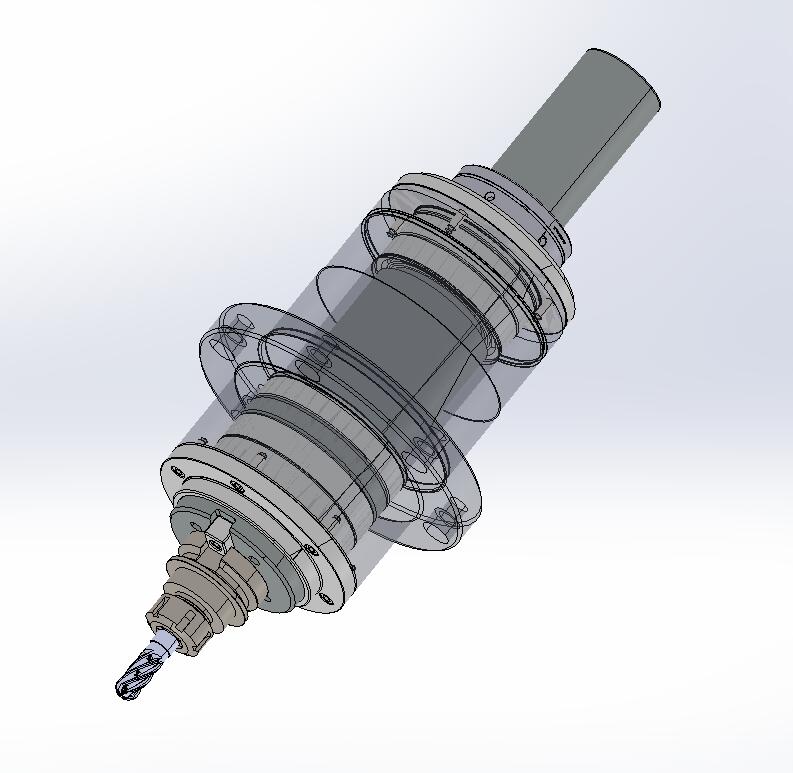
Vintage Sewing Machine — Mechanism Design
Fully constrained parametric assembly of a vintage sewing machine modeled from reference drawings. Applied GD&T standards and performed tolerance stack-up analysis across all critical kinematic linkages.
Technical Scope
- 50+ components modeled from reference drawings
- Comprehensive tolerance stack-up analysis
- GD&T applied per ASME Y14.5 on all mating surfaces
- Kinematic motion study validating linkage clearances
Engineering Highlights
- Fully constrained assembly with correct kinematic DOF
- All complex linkages verified for functional motion accuracy
- GD&T ensuring correct functional clearances throughout
- Drawing package with machining and assembly notes
Control & Simulation · Electric Power and Energy Systems Group, UBC
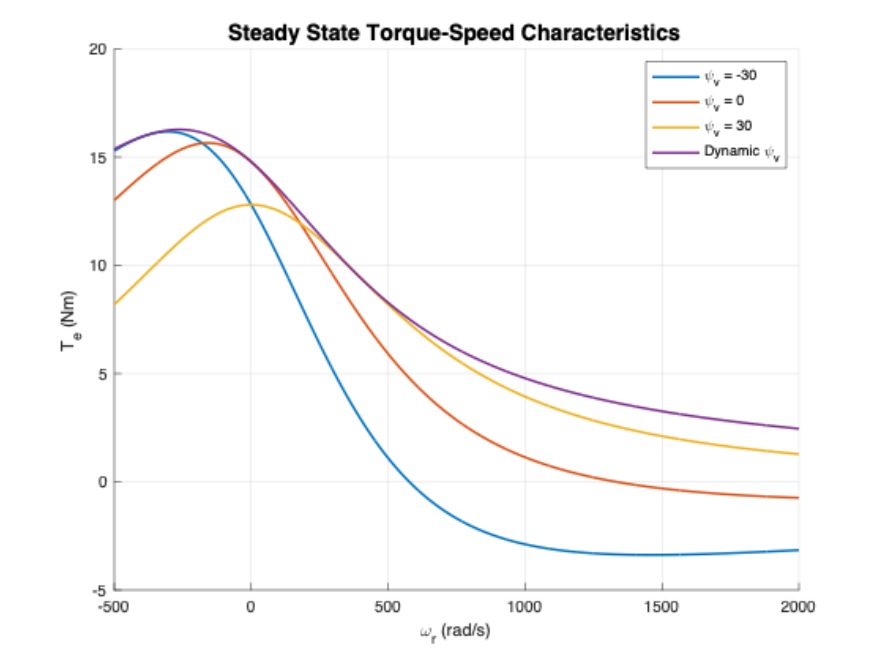
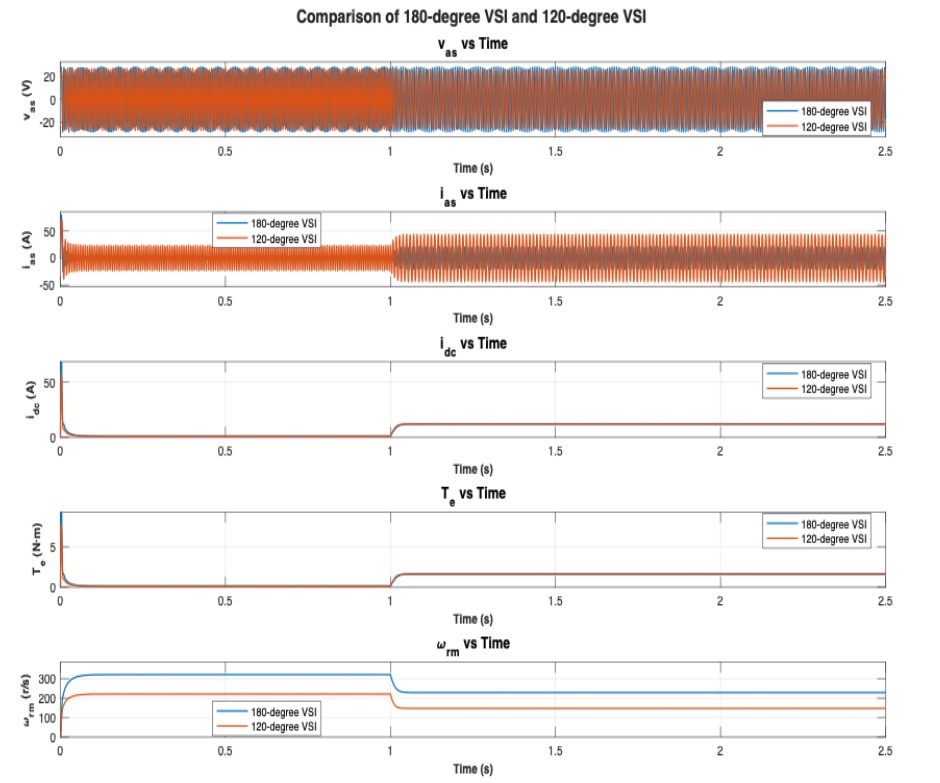
BLDC Motor Drive — MTPV Control Optimization
Dynamic MATLAB/Simulink simulation of a BLDC motor drive using Average Value Models (AVM), with a Maximum Torque Per Voltage control strategy derived by mathematically formulating the optimal voltage lead angle under voltage constraints.
Method
- Average Value Model (AVM) for computational efficiency
- MTPV strategy derived from voltage constraint boundary
- Optimal voltage lead angle formulated analytically
Results
- Maximized high-speed torque output under voltage limits
- Reduced simulation computation time via AVM
- Control theory validated against full-order model
Click to enlarge
Control & Simulation · Intern Project · Sands China
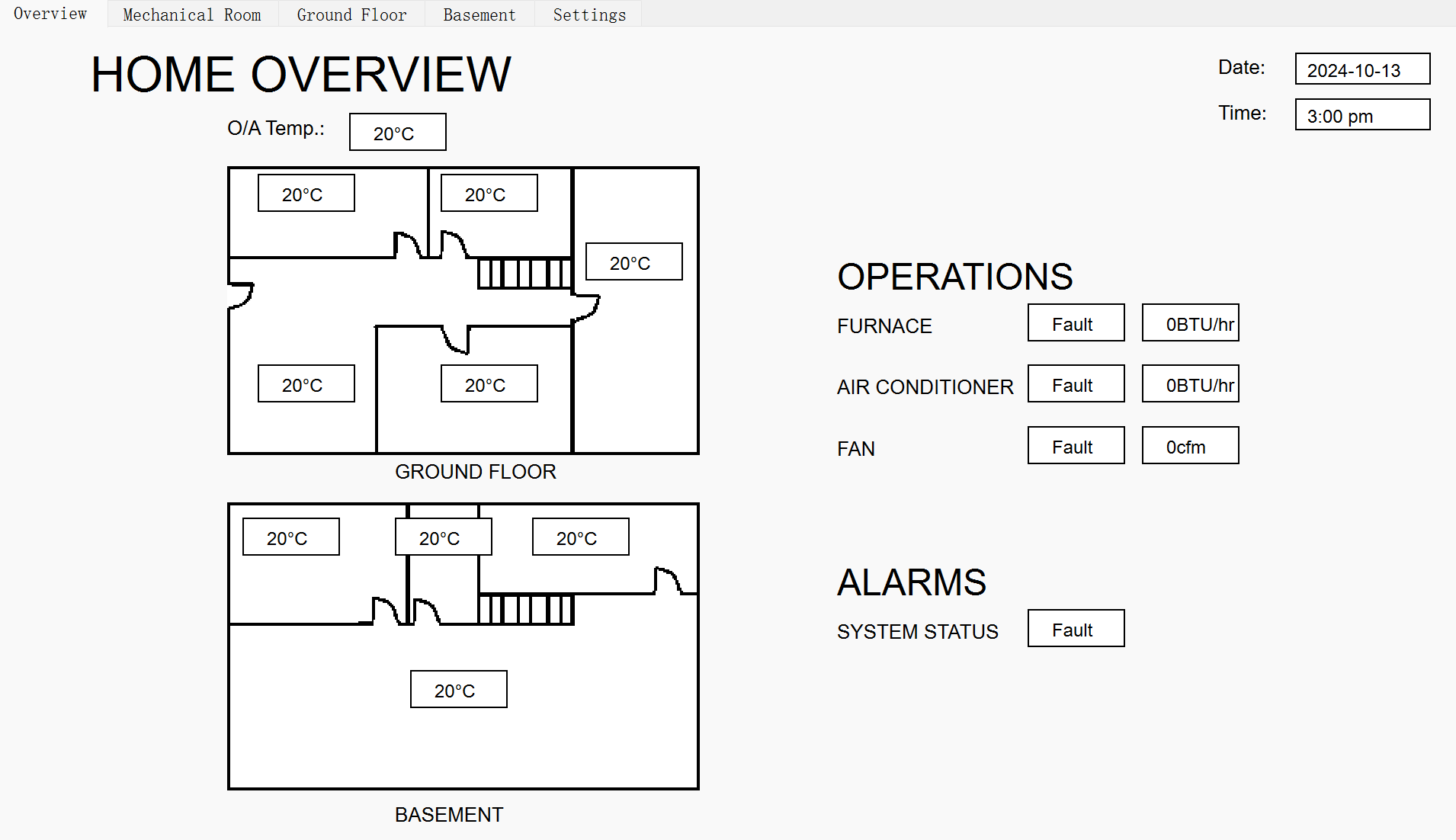
Autonomous HVAC Control System
GUI-based autonomous HVAC automation system designed during internship — interactive component monitoring, real-time closed-loop temperature control, and energy consumption optimization across multiple building zones.
Features
- Interactive GUI for live HVAC monitoring
- Dynamic component control interface
- Real-time feedback loops for temperature regulation
- Multi-zone energy optimization strategy
Outcome
Autonomous system maintaining comfort setpoints across commercial HVAC zones while minimizing energy consumption through real-time feedback-driven control.
Click to enlarge
Control & Simulation · UBC Course Design
Automated Warehouse Management System
2D simulation platform for warehouse operations — configurable environment parameters, item inventory management, robot fleet control, and automated task scheduling through an intuitive graphical interface.
Features
- 2D configurable warehouse environment
- Item inventory and robot fleet management
- Automated task queue and execution pipeline
- Graphical user interface for full parameter control
Stack
- Python · GUI framework
- 2D simulation engine
- Event-driven task scheduler
- Robot path coordination logic
Control & Simulation · Independent Project
Electromagnetic Calculation Tool — DC PM Motors
Python-based computational tool automating magnetic circuit analysis for DC permanent magnet motors — eliminates manual iteration cycles in early-stage motor design and outputs performance prediction curves for rapid design comparison.
Function
- Automated magnetic flux path analysis
- Reluctance and MMF calculation pipeline
- Performance curve output for rapid design comparison
- Multi-pole geometry extension support
Impact
- Eliminates manual iteration in preliminary motor design
- Reduces time-to-first-estimate significantly
- Structured for extension to complex motor topologies
Research · UBC Graduate Thesis
L-DED Closed-Loop Temperature Monitoring
Graduate thesis investigating closed-loop thermal control for Laser-based Directed Energy Deposition — real-time melt pool temperature stabilization to achieve consistent layer deposition and suppress thermal defects in additive manufactured parts.
Supervisors
Ryozo Nagamune & Xiaoliang Jin
CEL & AMP Labs, UBC
Contribution
- Closed-loop thermal strategy for melt pool stabilization
- Real-time temperature feedback integration
- Reduction of thermal defects in deposited layers
- System validated on L-DED experimental platform
Click to enlarge
Research · Soft Sensors-Actuators-Robots Lab
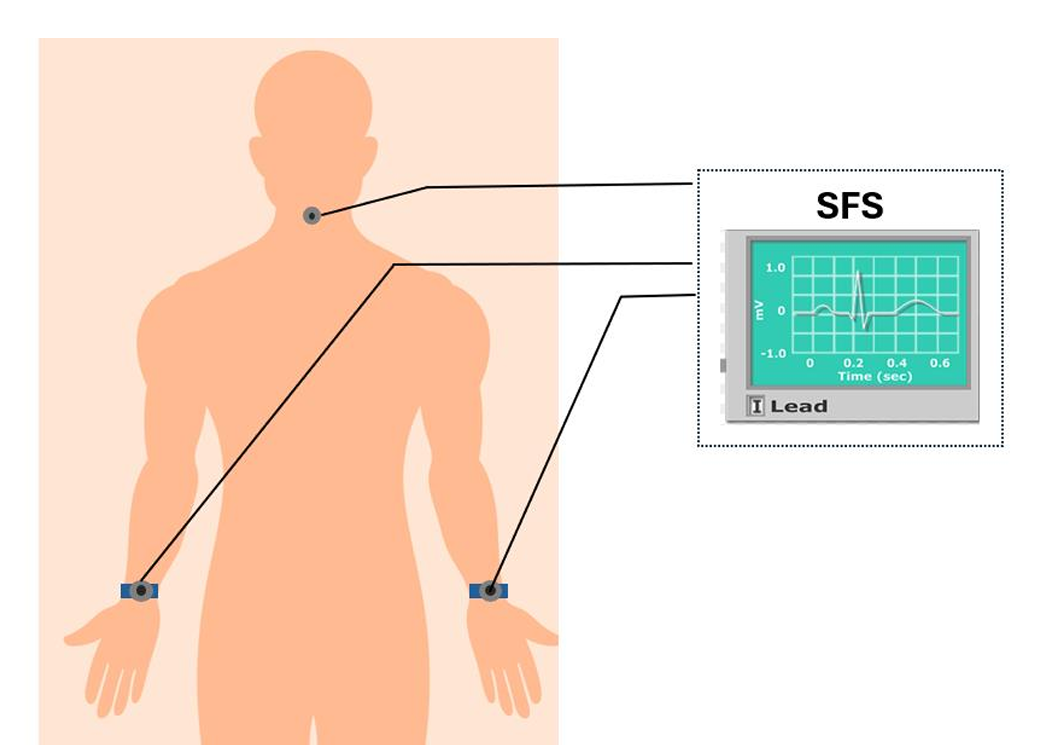
Self-Powered Flexible Sensor System
Novel self-powered flexible electromechanical sensors for detecting subtle physiological signals — pulse and muscle movement detection for personal health monitoring. Full pipeline from material synthesis through wearable device integration.
Supervisor
Junwen Zhong
Soft Sensors-Actuators-Robots Lab
Full Pipeline
Material synthesis → electromechanical characterization → signal detection validation → wearable device integration
Research · CNC Machining Dynamics
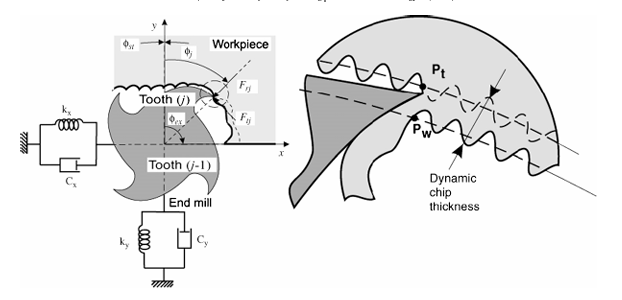
A17050 Slot Milling Chatter Stability & Optimization
Comprehensive chatter stability prediction and CNC machining optimization for A17050 aluminum alloy slot milling — FRF modeling, stability lobe diagram generation, and feed drive control design with trajectory planning.
Stability Analysis
- FRF (Frequency Response Function) modeling
- Stability Lobe Diagram (SLD) generation
- Critical axial depth of cut calculation
- Optimal spindle speed selection from SLD
Control & Trajectory
- Lead-lag compensator design for feed drive system
- Trapezoidal velocity trajectory planning
- Tracking error minimization under cutting forces
- Stability margin verification for designed controller
Click to enlarge
Robotics · In Progress
Low-Cost Dual-Arm Mobile Robot — AlohaMini
Building a low-cost teleoperated dual-arm mobile manipulator based on the open-source AlohaMini framework to validate imitation learning algorithms on household manipulation tasks using ACT/Diffusion Policy benchmarks.
Scope
- Full hardware assembly and system integration
- Actuator control firmware implementation
- Teleoperation interface development
- Data collection pipeline for imitation learning
Goal
Validate imitation learning on household manipulation tasks using ACT/Diffusion Policy on a reproducible low-cost dual-arm hardware platform.
Click to enlarge
Robotics · Academic Project
3D Surgical Instrument & Tissue Tracking
Real-time stereo vision system tracking 3D trajectories of surgical instruments and soft tissue — Lucas-Kanade optical flow combined with Shi-Tomasi corner detection, optimized for sub-pixel accuracy under rapid motion.
Method
- Lucas-Kanade optical flow + Shi-Tomasi detection
- Optimized pyramid layers for rapid-motion robustness
- Stereo reconstruction for 3D trajectory output
Results
- Sub-pixel accuracy: <0.8 px in 3D trajectory
- 15% fewer tracking failures during rapid motion
- Real-time performance maintained on standard hardware
Embedded Systems · Hardware Project
Arduino Smart Cup Heater
Arduino-controlled closed-loop cup heater with user-selectable 10–80°C setpoint via button interface, calibrated NTC thermistor sensor, and real-time LCD temperature feedback.
Hardware
- Arduino microcontroller
- NTC thermistor — calibrated vs water reference
- LCD display — real-time setpoint and temperature
- Button interface — setpoint increment/decrement
Key Engineering Work
- Sensor offset calibration vs actual water temperature
- Closed-loop control to user-defined setpoint
- Mechanical enclosure design and integration
- Safety cutoff at temperature limit
Embedded Systems · Coming Soon
Embedded Sensor Interface
Embedded firmware development for sensor data acquisition and real-time processing on microcontroller platform. Details to be added.